اعوذ بالله من الشیطان الرجیم
بسم الله الرحمن الرحیم
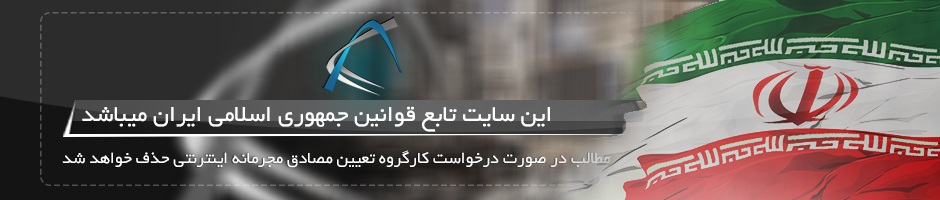
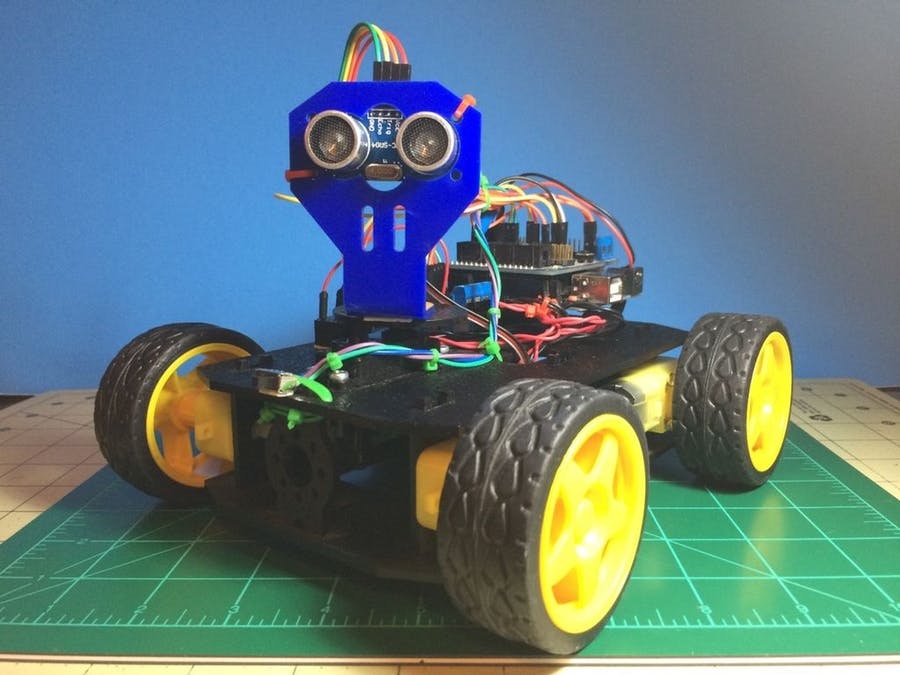
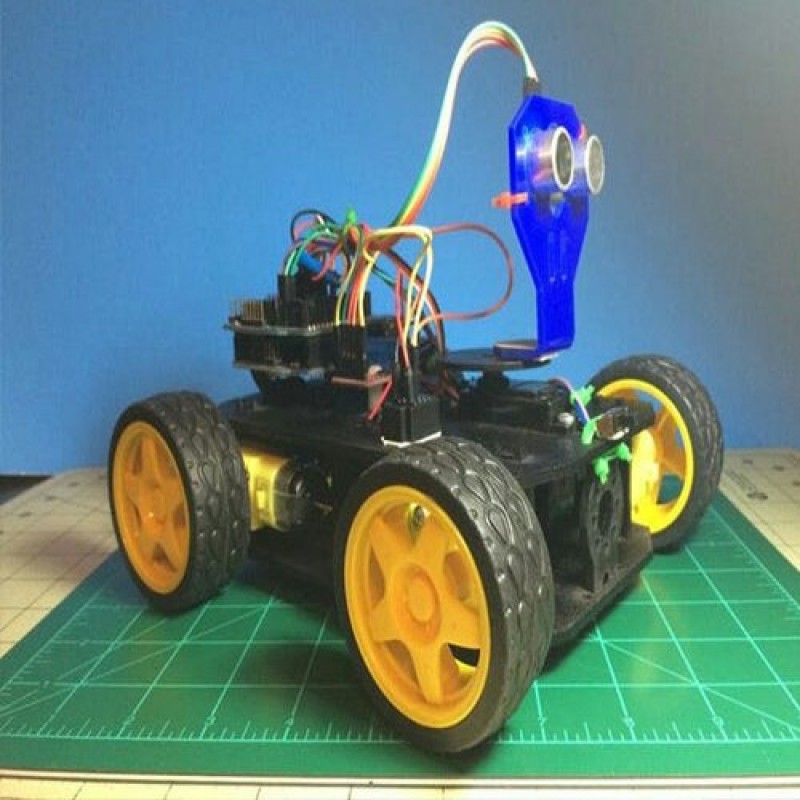
در این پروژه به صورت مرحله به مرحله و با تصاویر به آموزش ساخت یک ربات چهار چرخ هوشمند
می پردازیم که میتواند موانع را به صورت خودکار تشخیص داده و از آنها فاصله بگیرد
و به مسیرخود ادامه دهد.
در مسابقات رباتیک حل مارپیچ(ماز) از ربات های مانع گریز استفاده می شود و ربات ها به صورت هوشمند موانع را تشخیص داده و مسیر درست را پیدا میکنند. معمولا ربات های مانع گریز(ربات فرار از موانع) یا به صورت غیر قابل برنامه ریزی ساخته میشوند و یا به صورت قابل برنامه ریزی.
در نوع اول که نمونه ساده از ربات مانع گریز است و نیازی به برنامه نویسی ندارد و نسبت به نوع دوم کم خطرتر است، برای تشخیص موانع توسط ربات از کلیدهای قطع و وصل به نام میکروسوئیچ استفاده میشود که با فشاری که در اثر برخورد ربات با موانع روی کلید ایجاد میشود، ربات مسیر خود را تغییر می دهد.اما در نوع دوم، ربات از قبل برنامه ریزی میشود و مطابق دستورالعملی که برنامه نویس به آن داده عمل میکند. در این نوع ربات ها برای تشخیص موانع توسط ربات از حسگرهای مختلفی نظیر حسگر مادون قرمز IR یا حسگر فراصوت HC-SR04 استفاده میشود.
@@ربات حاضر از چند جهت با انواع مشابه خود تفاوت هایی دارد از جمله:
1. برای این ربات مانع گریز دو حالت حرکتی در برنامه تعریف شده که توسط یک کلید کشویی تنظیم و کنترل می شود>> حالت اول به این صورت است که ربات مانع را دیده و از آن فاصله میگیرد( این حالت در اکثر رباتهای مانع گریز وجود دارد و بر این مبنا حرکت میکنند.) حالت دومی که ربات حاضر در حرکت خود دارد، حالت نگه داشتن دور ربات است؛ در این وضعیت ربات ابتدا به سمت جلو حرکت میکند و در صورتی که مانعی در روبرویش باشد، به حالت مع به عقب بر می گردد.
فیلم کوتاهی از نحوه حرکت ربات مانع گریز حاضر
2. یکی از مشکلات ربات های چهار چرخ، مسئله کشش موتور است. خودروها و کامیون های چهار چرخ نسبت به یک وسیله نقلیه دو چرخ از کشش و توزیع برق بسیار بهتری برخوردار هستند. اما این موضوع درباره ربات های چهار چرخ صادق نیست چراکه در هر کدام از چرخ ها یک موتور مجزا وجود دارد و با روشن شدن موتورها، سرعت و قدرت حرکت با یکدیگر همخوانی ندارند. به همین دلیل در بعضی از سطح ها شاهد کندی حرکت ربات و عدم کشش مناسب آن روی زمین هستیم. در بدنه های چهار چرخ نسبت به دو چرخ وقتی کشش و قدرت زیادی مصرف میشود، این امر بسیار رخ می دهد. برای کمک به حرکت ربات در این رابطه(البته به طور کامل این مشکل را رفع نمیکند ولی به حرکت ربات کمک میکند)؛ در برنامه از تابعی استفاده کردیم که در حرکت هر کدام از موتورها به کار می رود. این تابع با تقسیم سرعت به چهار و حلقه در چهار مرتبه، سرعت موتورها را افزایش می دهد و باعث میشود تا سرعت موتورها به آهستگی تنظیم شوند و در نتیجه کشش روی سطح و حرکت بهتر انجام میگیرد و ساییدگی موتورهای دنده را کم میکند.
.
پروژه حاضر شامل آموزش مراحل ساخت ربات مانع گریز به همراه تصاویر به صورت pdf + کد پروژه + نقشه مدار(شماتیک) می باشد.
قیمت: 18000 تومان
جهت خرید پروژه به غرفه ما در سایت باسلام مراجعه نمایید.
نحوه خرید هم به این صورت است که بعد از انتخاب پروژه مورد نظرتان در قسمت آدرس گیرنده، تنها آدرس ایمیل خود را وارد میکنید و در انتها بعد از پرداخت هزینه پروژه از طریق درگاه پرداخت الکترونیک سامان باپذیرنده سایت باسلام، پروژه مذکور به ایمیلتان ارسال میشود.**ضمنا سایت باسلام کدهای تخفیف 10 هزار تومانی، 15 هزار تومانی و بیشتر برای کاربران در نظر گرفته و ممکن است برای خرید پروژه ها اصلا هزینه ای پرداخت نکنید!
.
***نکته مهم***
هدف از این پروژه، ارائه علم الکترونیک است و هرگونه ضرر و زیان های استفاده از آن(مثل خطراتی که حسگر فراصوت HC-SR04 برای انسان دارد)، بر عهده سازندگان است و نویسنده هیچگونه مسئولیتی در این رابطه نمی پذیرد!
تصاویر:



درباره این سایت